MSE 429 Project
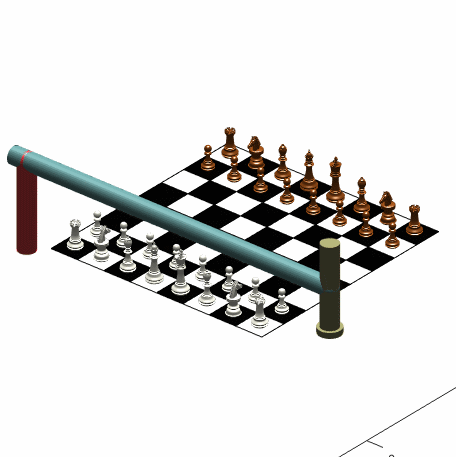
For my second to last semester, I took MSE 429 - Advanced Kinematics for Robotic Systems. In this class, I did a project on modeling a robotic manipulator in MATLAB. The manipulator was a 3-DOF manipulator modeled using the Denavit-Hartenberg parameters. This manipulator was used to perform a 10 move chess opening for both white and black.
The main challenges for this project were calculating the Denavit-Hartenberg parameters, and the inverse kinematics of the system, as well as animating the movement. I had learned and practiced enough calculations, but animating on MATLAB was a new skill I learned while completing the project.
I am especially proud of this project because of the teamwork and step-by-step processes we followed to slowly build up our vision. This project started with rough sketch, to which we added length, angles and distance parameters. We performed calculations of the DH parameters and inverse kinematics to ensure the manipulator could reach all desired coordinates of the board. From there, we modeled the pieces and learned how to import SolidWorks models into MATLAB for animations. After many hours of writing, testing and debugging my code, we had a working animation.